Động cơ điện rất mong muốn có đường cong tốc độ mô-men xoắn vì nó không chỉ có thể tạo ra mô-men xoắn cực đại ở tốc độ 0 mà còn trên một phạm vi rộng về tốc độ. Mặc dù khả năng này tạo ra những cơ hội mới với động cơ điện, nhưng nó cũng tạo ra một số thách thức mới khi so sánh với động cơ đốt trong. Một trong những thách thức này là gợn mô-men xoắn, có một số ý nghĩa bao gồm kiểm soát, công suất đầu ra, tiếng ồn, độ rung và độ bền. Gợn mô-men xoắn có thể được mô tả là sự thay đổi của mô-men xoắn đầu ra khi động cơ quay. Bài viết này sẽ tập trung vào việc đo lường các tín hiệu này và ý nghĩa của chúng đối với tiếng ồn và độ rung. Bài viết này cũng sẽ bao gồm các ví dụ từ một số nghiên cứu điển hình chứng minh tác động của gợn mô-men xoắn và tác động của nó đến NVH.
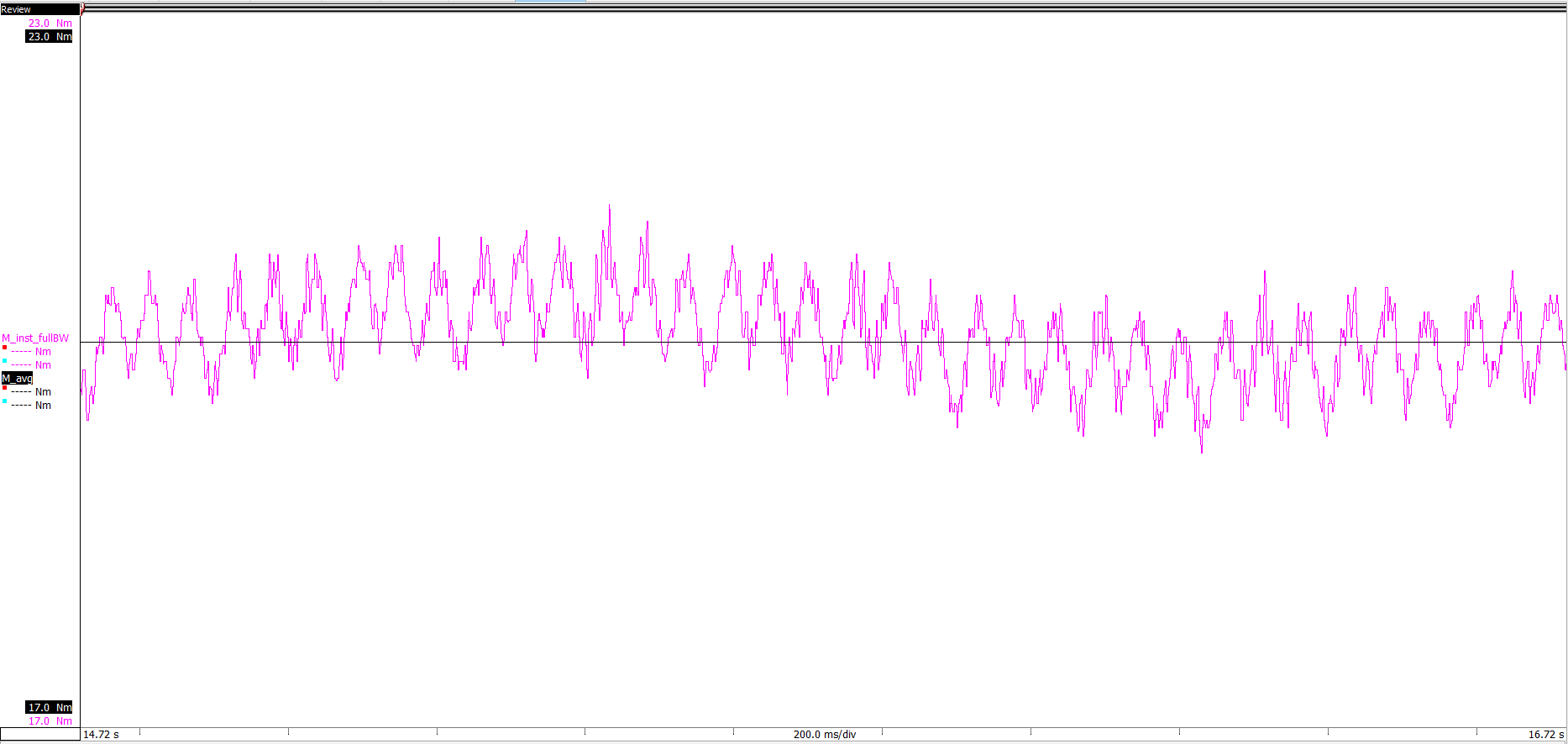
Mô-men xoắn thường được mô tả là một lượng DC, nhưng nó có một thành phần tần số. Cụ thể, trong động cơ điện, mô-men xoắn sẽ có giá trị trung bình DC, với độ lệch theo chu kỳ. Độ lệch này sẽ có tần số là hàm của tốc độ quay và biên độ là phần trăm của giá trị DC. Một ví dụ về gợn mô-men xoắn có thể thấy trong hình 1, trong đó mô-men xoắn trung bình là DC, nhưng mô-men xoắn băng thông cao cho thấy gợn khoảng +/-2Nm. Mặc dù điều này có vẻ không phải là vấn đề quan trọng, nhưng tần số cao của gợn này có thể dẫn đến nhiều kết quả không mong muốn; bao gồm tiếng ồn có thể nghe được, rung động cấu trúc và mỏi bánh răng. Để giảm thiểu gợn mô-men xoắn, chúng ta cần hiểu các nguồn của nó bao gồm kích thích điện, kết cấu máy, cộng hưởng cơ học, căn chỉnh và tải.
Sự kích thích điện của máy góp phần tạo ra gợn mô men xoắn vì mô men xoắn của máy sẽ theo dòng điện. Ví dụ cực đoan nhất về điều này là máy một pha, trong đó sẽ có mô men xoắn tuần hoàn ở tần số cơ bản gấp đôi và một phần tử mô men xoắn bằng không. Bằng cách tăng các pha, bạn có thể loại bỏ điểm giao nhau bằng không và biên độ của gợn sóng, nhưng bạn sẽ tăng tần số. Máy thông thường sẽ có ba pha, có lợi cho gợn mô men xoắn, nhưng sẽ không loại bỏ được nó.
Vì mô men xoắn được tạo ra bởi sự kích thích hình sin, nên gợn mô men xoắn từ sự kích thích sẽ có cùng tần số với tín hiệu điện, nghĩa là khi tốc độ tăng, tần số gợn mô men xoắn cũng tăng. Ngoài ra, các yếu tố khác của gợn mô men xoắn sẽ có mặt, vì sự kích thích không phải là sóng sin hoàn hảo. Các bộ biến tần hoạt động ở tần số cao thường được sử dụng và cuộn dây máy sẽ ảnh hưởng đến sự phân phối dòng điện. Do đó, các vấn đề này sẽ tạo ra gợn mô men xoắn bổ sung.
Cấu trúc là một ví dụ khác về một yếu tố góp phần có thể tác động đến gợn mô-men xoắn. Trong tất cả các máy, gợn mô-men xoắn được điều khiển bởi chức năng quấn máy và mỗi loại máy đều có sự đóng góp của gợn mô-men xoắn từ từ tính của rotor tương tác với sắt stato. Trong các máy cảm ứng, gợn mô-men xoắn có biên độ nhỏ hơn và có thể được kiểm soát bằng độ lệch của các thanh rotor. Với việc sử dụng máy nam châm vĩnh cửu ngày càng tăng, bạn cần tính đến tác động của nam châm lên rotor, ngoài chức năng quấn và độ lệch. Các nam châm trên rotor sẽ hút vào sắt trên stato và khi máy quay, các nam châm sẽ hút vào từng răng stato. Vì có một số lượng cố định các nam châm rotor và khe stato, nên yếu tố gợn mô-men xoắn này cũng sẽ tỷ lệ thuận với tốc độ. Biên độ cao và tần số có thể cao do tốc độ của máy khiến gợn mô-men xoắn từ nam châm vĩnh cửu trở thành một vấn đề khó để mô tả và giảm thiểu.
Do sự kích thích và kết cấu của máy tạo ra gợn mô men xoắn, bạn cũng có thể sử dụng kết hợp hai tính năng này để giảm thiểu nó. Các kiểu kết cấu khác nhau kết hợp với các loại điều khiển máy khác nhau có thể được sử dụng để giảm gợn mô men xoắn. Những tiến bộ trong công nghệ phản hồi và biến tần cho phép chúng ta mở rộng phạm vi giảm thiểu gợn mô men xoắn. Để xác thực rằng các phương pháp giảm gợn mô men xoắn này có hiệu quả, các kỹ sư cần xác thực thiết kế của họ bằng các phép đo.